SCARA ROBOTIC ARMS – Z-Arm-2442B Haɗin gwiwa Robotic Arm



Babban Rukuni
Hannun robot na masana'antu / Hannun robot na haɗin gwiwa / Riƙe wutar lantarki/Mai kunna fasaha/Mafita ta atomatik
Aikace-aikace
SCIC Z-Arm cobots robot ne masu sauƙin nauyi mai sassa 4 tare da injin tuƙi da aka gina a ciki, kuma ba sa buƙatar masu rage farashi kamar sauran scara na gargajiya, wanda ke rage farashi da 40%. SCIC Z-Arm cobots na iya yin ayyuka waɗanda suka haɗa da amma ba'a iyakance ga bugu na 3D ba, sarrafa kayan aiki, walda, da sassaka laser. Yana da ikon inganta inganci da sassaucin aikinku da samarwa.
Siffofi

Babban Daidaito
Maimaitawa
±0.02mm
Babban Nauyin Aiki
5kg
Babban Tsawon Hannu
Axis na JI 220mm
Axis na J2 200mm
Farashin Mai Kyau
Ingancin matakin masana'antu
Cfarashi mai kyau
Kayayyaki Masu Alaƙa



Sigar Musamman
An tsara SCIC Z-Arm 2442B ta SCIC Tech, robot ne mai sauƙin amfani, mai sauƙin tsarawa da amfani, yana tallafawa SDK. Bugu da ƙari, ana tallafawa gano karo, wato, zai tsaya ta atomatik lokacin da aka taɓa ɗan adam, wanda shine haɗin gwiwa tsakanin ɗan adam da injin, tsaro yana da girma.
| Hannun Robot na haɗin gwiwa na Z-Arm 2442B | Sigogi |
| Tsawon hannu 1 axis | 220mm |
| Kusurwar juyawa ta axis 1 | ±90° |
| Tsawon hannu mai axis 2 | 200mm |
| Kusurwar juyawa ta axis guda biyu | ±164° (Zaɓi: digiri 15-345) |
| Juyawar axis ta Z | 240 (Za a iya keɓance tsayin) |
| Tsarin juyawar axis na R | ±1080° |
| Gudun layi | 1600mm/s (nauyin kaya 4kg) |
| Maimaitawa | ±0.02mm |
| Nauyin da aka saba ɗauka | 4kg |
| Matsakaicin nauyin da ake buƙata | 5kg |
| Matakin 'yanci | 4 |
| Tushen wutan lantarki | Daidaita 220V/110V50-60HZ zuwa ga ƙarfin 48VDC mafi girma 200W |
| Sadarwa | Ethernet |
| Faɗaɗawa | Mai sarrafa motsi mai haɗawa a ciki yana ba da faɗaɗa I/O 24 + ƙarƙashin hannu |
| Za a iya keɓance Z-axis a tsayi | 0.1m-0.5m |
| Koyarwar jan-axis Z | / |
| An tanadar hanyar sadarwa ta lantarki | Tsarin tsari na yau da kullun: wayoyi 24 * 23awg (marasa kariya) daga sashin soket ta cikin murfin hannu na ƙasa Zaɓi: Bututun injin 2 φ4 ta cikin kwamitin soket da flange |
| Masu riƙe wutar lantarki na HITBOT masu jituwa | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Hasken numfashi | / |
| Tsarin motsi na hannu na biyu | Daidaitacce: ±164° Zaɓi: 15-345dig |
| Kayan haɗi na zaɓi | / |
| Amfani da muhalli | Zafin yanayi: 0-45°C Danshi: 20-80% RH85 (babu sanyi) |
| Shigarwar dijital ta tashar I/O (wanda aka keɓe) | Tsawaita hannun gaba 9+3+ (zaɓi ne) |
| Fitar dijital ta tashar I/O (keɓe) | Tsawaita hannun gaba 9+3+ (zaɓi ne) |
| Shigar da analog na tashar I/O (4-20mA) | / |
| Fitowar analog ta tashar I/O (4-20mA) | / |
| Tsawon hannun robot | 683mm |
| Nauyin hannun robot | Nauyin nauyi mai nauyin 240mm 27kg |
| Girman tushe | 250mm*250mm*15mm |
| Nisa tsakanin ramukan da aka gyara tushe | 200mm*200mm tare da sukurori guda huɗu na M8*20 |
| Gano karo | √ |
| Koyarwar ja | √ |
Sigar Motsi ta M1 (Juya Waje)
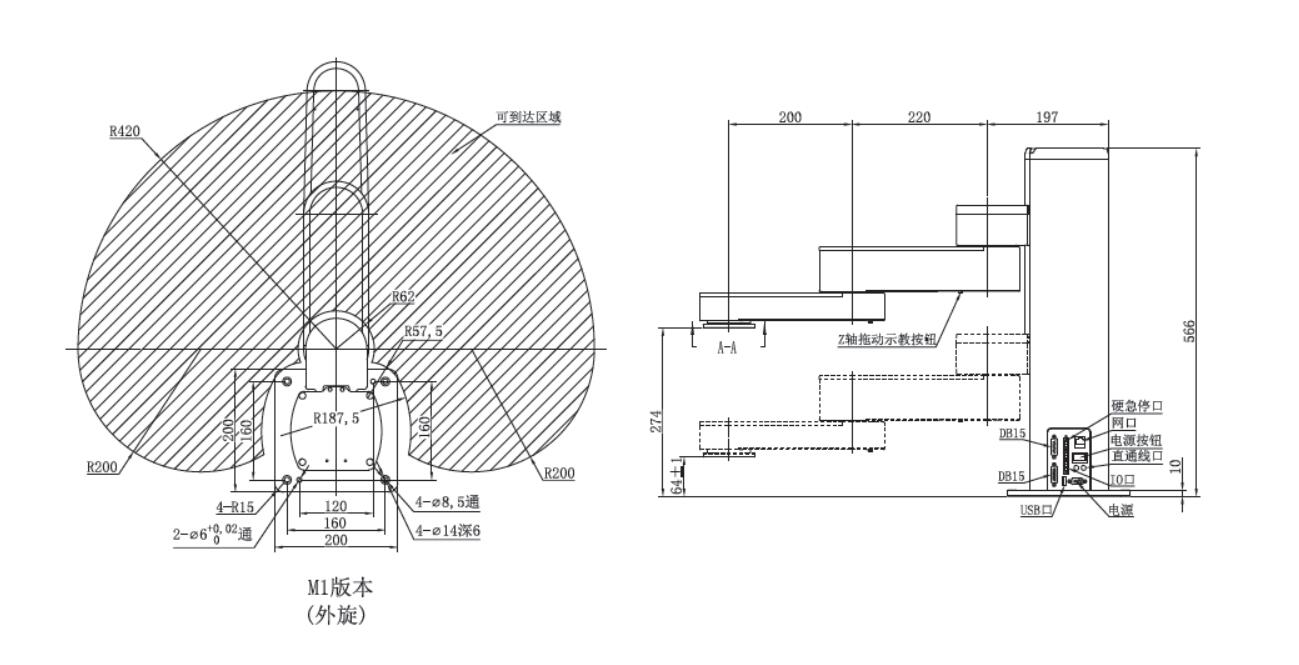
Gabatarwar Fuskar Sadarwa

An sanya hanyar haɗin hannu ta robot Z-Arm 2442 a wurare 2, gefen tushen hannun robot (wanda aka ayyana a matsayin A) da kuma bayan ƙarshen hannun. Bangaren haɗin gwiwa a A yana da hanyar haɗin wutar lantarki (JI), hanyar haɗin wutar lantarki mai ƙarfin 24V DB2 (J2), fitarwa zuwa tashar I/O mai amfani DB15 (J3), tashar I/O mai shigar da mai amfani DB15 (J4) da maɓallan saita adireshin IP (K5). Tashar Ethernet (J6), tashar shigarwa/fitarwa ta tsarin (J7), da kuma soket biyu na wayoyi masu madaidaitan 4-core J8A da J9A.
Matakan kariya
1. Rashin ƙarfin aiki
An nuna cibiyar nauyin nauyi da kuma kewayon nauyin nauyi da aka ba da shawarar tare da inertia na motsi na Z axis a cikin Hoto na 1.

Siffa ta 1 XX32 bayanin nauyin kayan aiki
2. Ƙarfin karo
Ƙarfin abin da ke haifar da kariyar karo a kwance a haɗin gwiwa: ƙarfin jerin XX42 shine 40N.
3. Ƙarfin waje na Z-axis
Ƙarfin waje na axis na Z ba zai wuce 120N ba.

Hoto na 2
4. Bayanan kula don shigar da tsarin Z na musamman, duba Hoto na 3 don ƙarin bayani.

Hoto na 3
Gargaɗi Bayani:
(1) Don axis ɗin Z da aka keɓance tare da babban bugun, ƙarfin axis ɗin Z yana raguwa yayin da bugun ke ƙaruwa. Lokacin da bugun axis ɗin Z ya wuce ƙimar da aka ba da shawarar, mai amfani yana da buƙatar ƙarfin, kuma saurin ya fi kashi 50% na matsakaicin gudu, ana ba da shawarar sosai a shigar da tallafi a bayan axis ɗin Z don tabbatar da cewa ƙarfin hannun robot ɗin ya cika buƙatun a babban gudu.
Ƙimar da aka ba da shawarar ita ce kamar haka: Jerin Z-ArmXX42 bugun Z-axis > 600mm
(2) Bayan an ƙara bugun Z-axis, za a rage tsayin axis na Z da tushe sosai. Idan buƙatun tsaye masu tsauri don axis na Z da ma'aunin tushe ba su dace ba, da fatan za a tuntuɓi ma'aikatan fasaha daban-daban.
5. An hana haɗa kebul na wutar lantarki da zafi. Gargaɗin da aka mayar da shi baya idan aka katse sandunan wutar lantarki masu kyau da marasa kyau.
6. Kar a danna hannun da ke kwance lokacin da aka kashe wutar.

Hoto na 4
Shawarar Mai Haɗa DB15

Hoto na 5
Samfurin da aka ba da shawara: Namiji mai fenti mai zinare mai harsashi ABS YL-SCD-15M Mace mai fenti mai zinare mai harsashi ABS YL-SCD-15F
Girman Bayani: 55mm*43mm*16mm
(Duba Hoto na 5)
Teburin Grippers Mai Dace da Hannun Robot
| Lambar Samfurin Hannun Robot | Grippers masu jituwa |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Bugawa ta 3D ta axis ta 5 |
| XX42 T2 | Z-EFG-50 DUK/Z-EFG-100 TXA |
Zane-zanen Girman Shigar da Adaftar Wuta
Tsarin XX42 24V 500W RSP-500-SPEC-CN na samar da wutar lantarki

Zane na Muhalli na Amfani da Waje na Hannun Robot

Kasuwancinmu







