Jerin Gripper na Wutar Lantarki na HITBOT – Gripper na Wutar Lantarki na Z-ERG-20




Babban Rukuni
Hannun robot na masana'antu / Hannun robot na haɗin gwiwa / Riƙe wutar lantarki/Mai kunna fasaha/Mafita ta atomatik
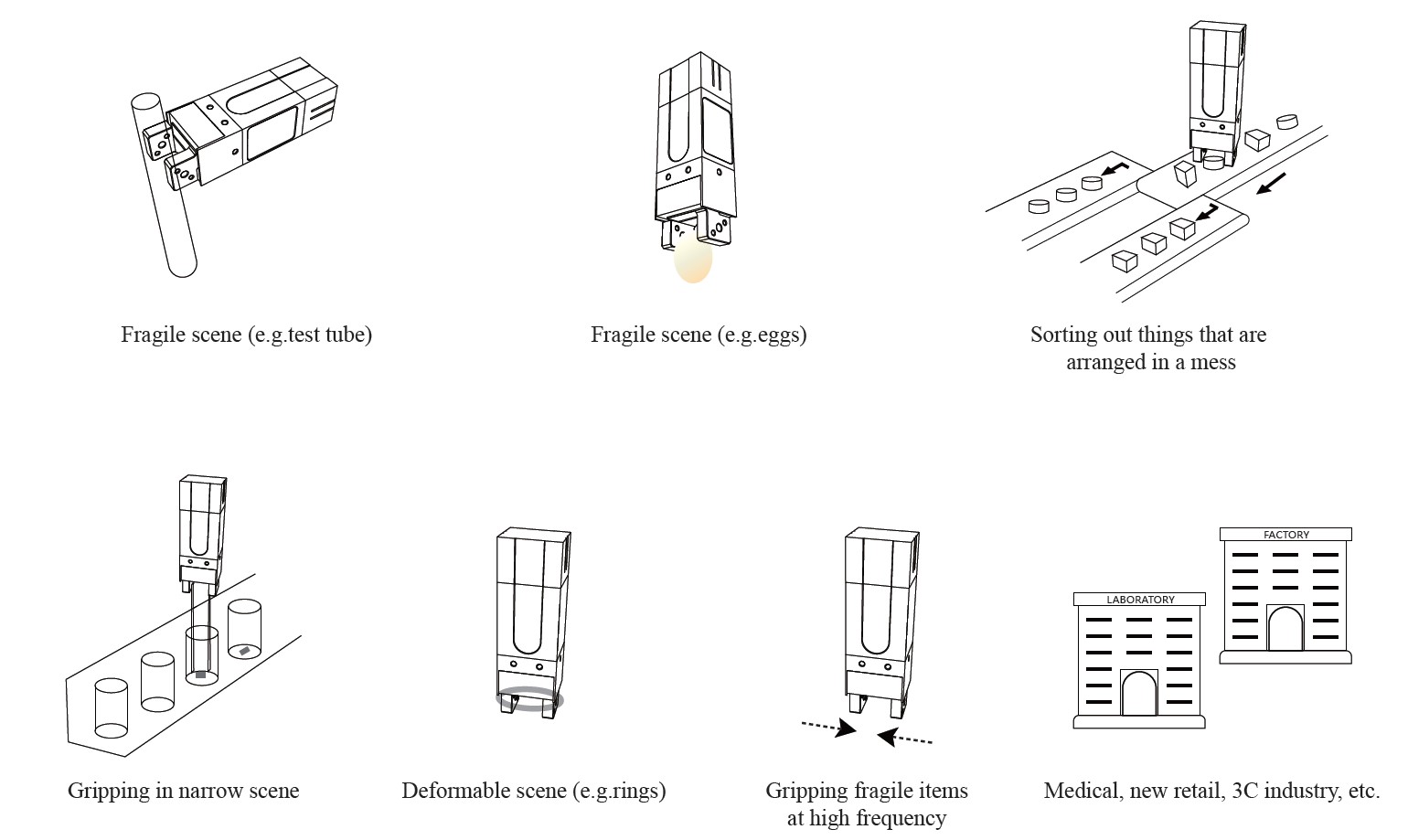
Aikace-aikace
Na'urorin riƙe robot na SCIC Z suna da ƙanana da tsarin servo da aka gina a ciki, wanda ke ba da damar cimma daidaitaccen iko na gudu, matsayi, da ƙarfin matsewa. Tsarin riƙewa na SCIC mai inganci don mafita na sarrafa kansa zai ba ku damar buɗe sabbin damammaki don yin ayyuka ta atomatik waɗanda ba ku taɓa tsammanin za su yiwu ba.
Fasali

· Goyi bayan juyawa mara iyaka da juyawar dangi, babu zamewa zobe, ƙarancin kuɗin kulawa
· Ana iya sarrafa juyawa da ƙarfin kamawa, matsayi da saurin daidai
· Tsawon rai na sabis, zagayowar da yawa, mafi kyawun aiki fiye da mai riƙewa na prenumatic
· Mai sarrafawa a ciki: ƙaramin wurin zama na sarari kuma mai sauƙin haɗawa
· Yanayin sarrafawa: tallafawa sarrafa bas ɗin Modbus da I/O



Sigar Musamman
Manipula na Z-ERG-20 yana da sauƙin aiki tare da mutane kuma yana tallafawa riƙo mai laushi. Riƙon lantarki yana da matuƙar haɗin kai kuma yana da fa'idodi da yawa:
●Goyi bayan juyawa mara iyaka da juyawar dangi, babu zamewar zobe, ƙarancin kuɗin kulawa.
●Ana iya sarrafa juyawa, ƙarfin matsewa, haƙa rami, da gudu daidai.
●Tsawon rai: da'irori miliyan goma, sun fi na'urorin damfara na iska kyau.
●Mai sarrafawa a ciki, don adana sarari, mai sauƙin haɗawa.
●Yanayin sarrafawa: tallafawa Modbus da ikon sarrafawa/ikon sarrafawa.
| Lambar Samfura Z-ERG-20 | Sigogi |
| Jimlar bugun jini | 20mm mai daidaitawa |
| Ƙarfin riƙewa | 10-35N mai daidaitawa |
| Maimaitawa | ±0.2mm |
| Nauyin riƙewa da aka ba da shawarar | ≤0.4kg |
| Yanayin watsawa | Rakin gear + jagorar layi |
| Cika mai na abubuwan da ke motsawa | Duk wata shida ko motsi miliyan 1/lokaci |
| Lokacin motsi na bugun hanya ɗaya | 0.20s |
| Matsakaicin karfin juyi | 0.3 Nm |
| Matsakaicin gudu na juyawa | 240 RPM |
| Tsarin juyawa | Juyawa mara iyaka |
| Juyawa baya | ±1° |
| Nauyi | 1.0kg |
| Girma | 54*54*141mm |
| Ƙarfin wutar lantarki na aiki | 24V ± 10% |
| Matsayin halin yanzu | 1.5A |
| Matsakaicin wutar lantarki | 3A |
| Ƙarfi | 50W |
| Ajin kariya | IP20 |
| Nau'in mota | Motar hidima |
| Matsakaicin zafin aiki | 5-55℃ |
| Tsarin zafi na aiki | RH35-80 (Babu sanyi) |
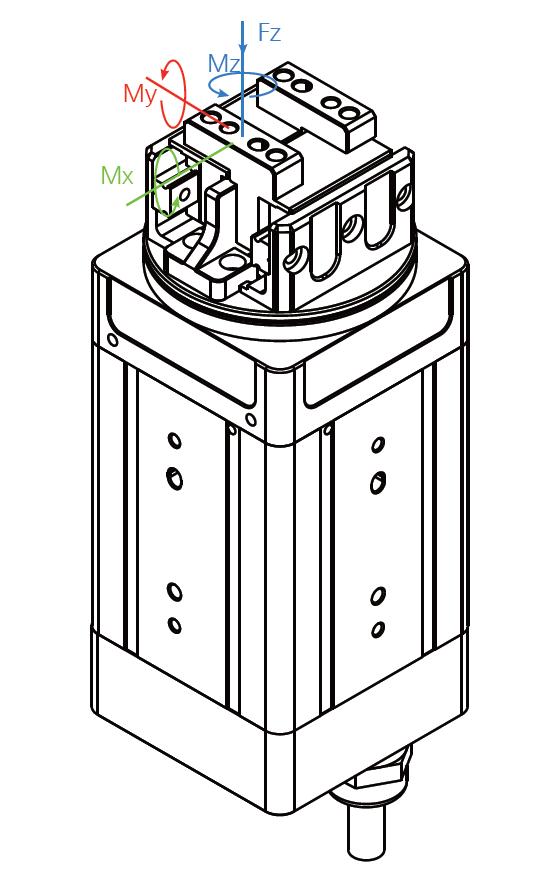
| Loda mai daidaituwa a tsaye | |
| Fz: | 100N |
| Juyin juyi mai izini | |
| Mx: | 1.35 Nm |
| Nawa: | 0.8 Nm |
| Mz: | 0.8 Nm |
Load Center of Gravity Offset
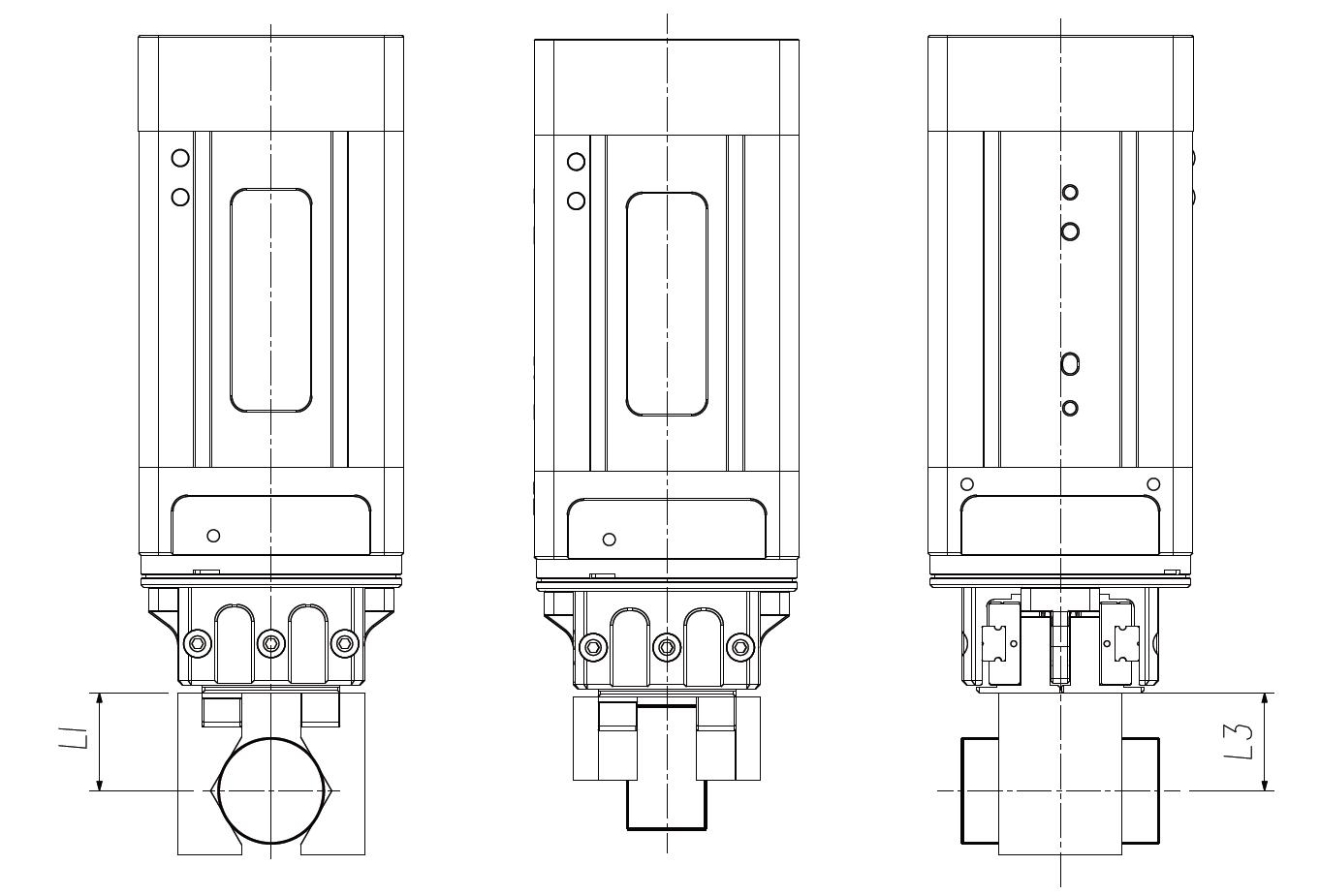
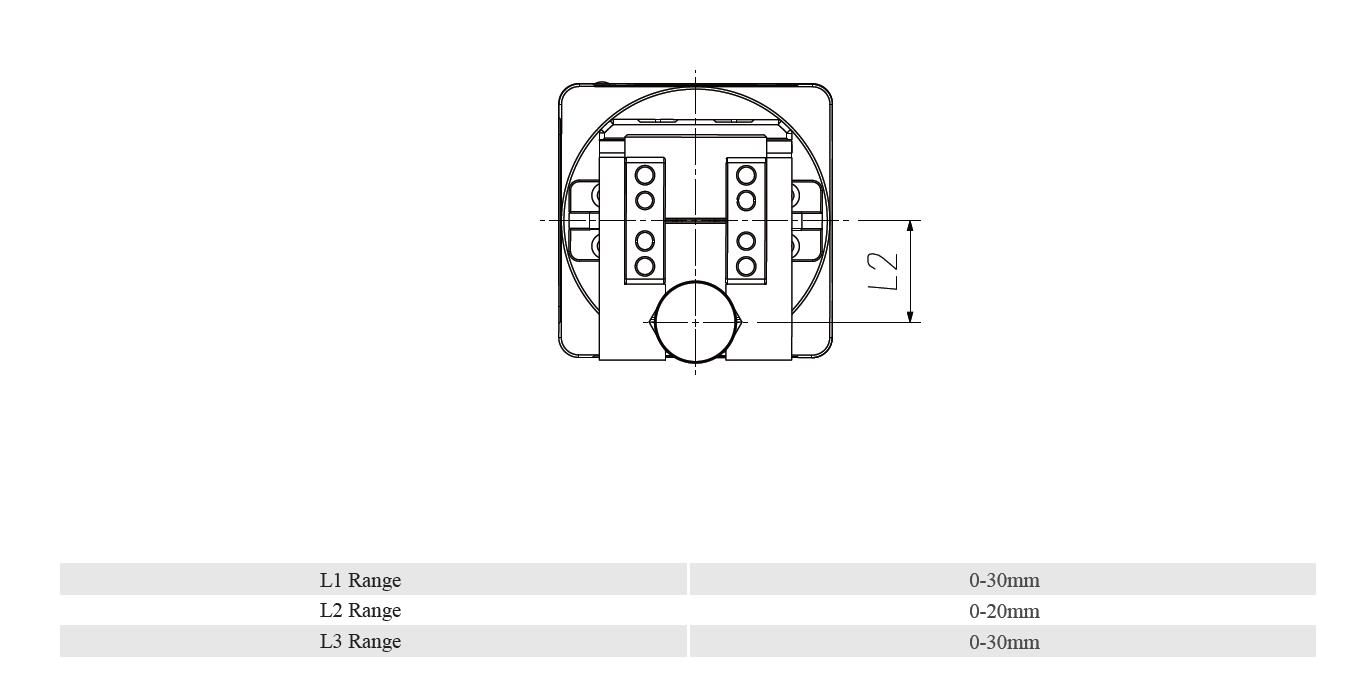
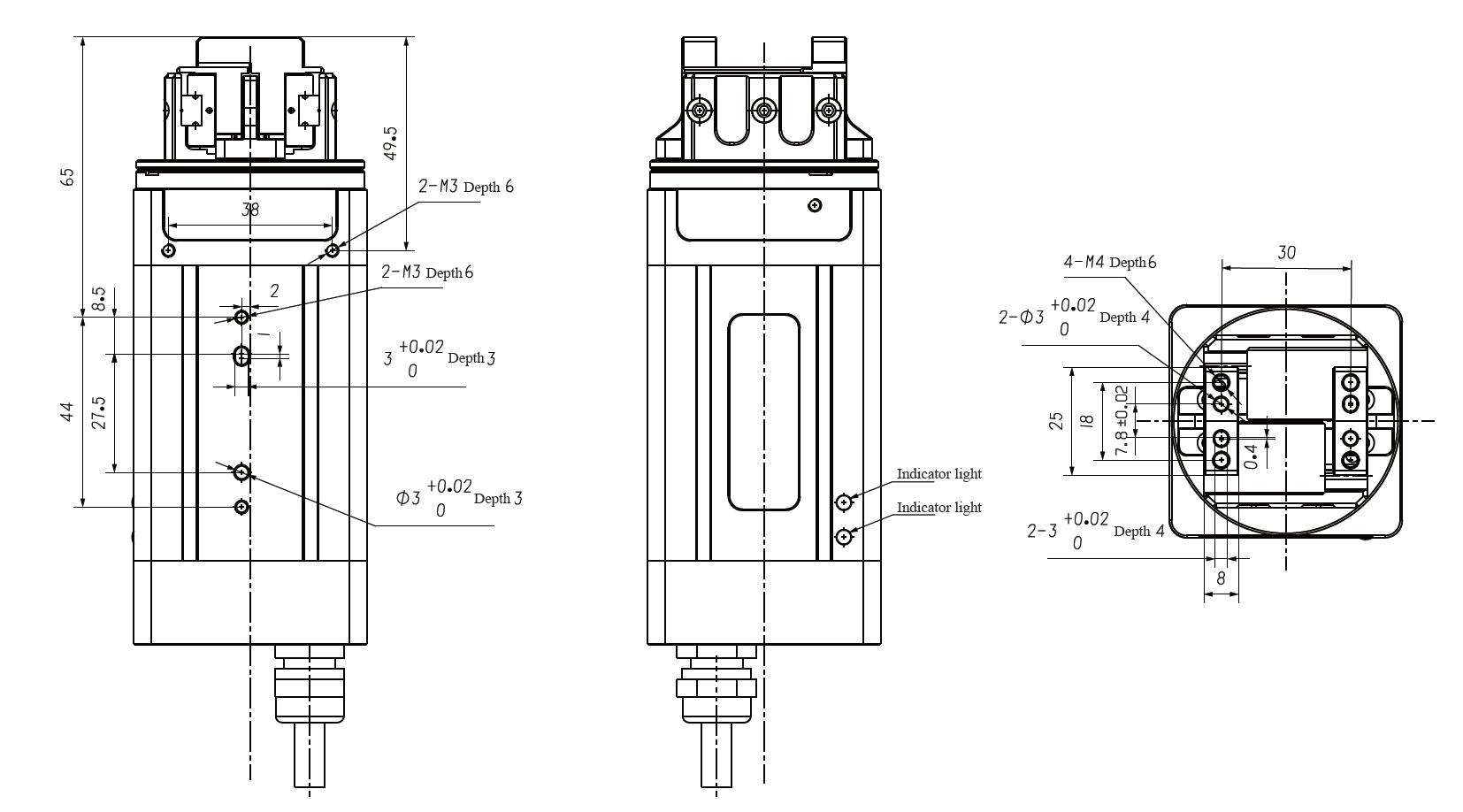
Tsarin Shigarwa na Girma
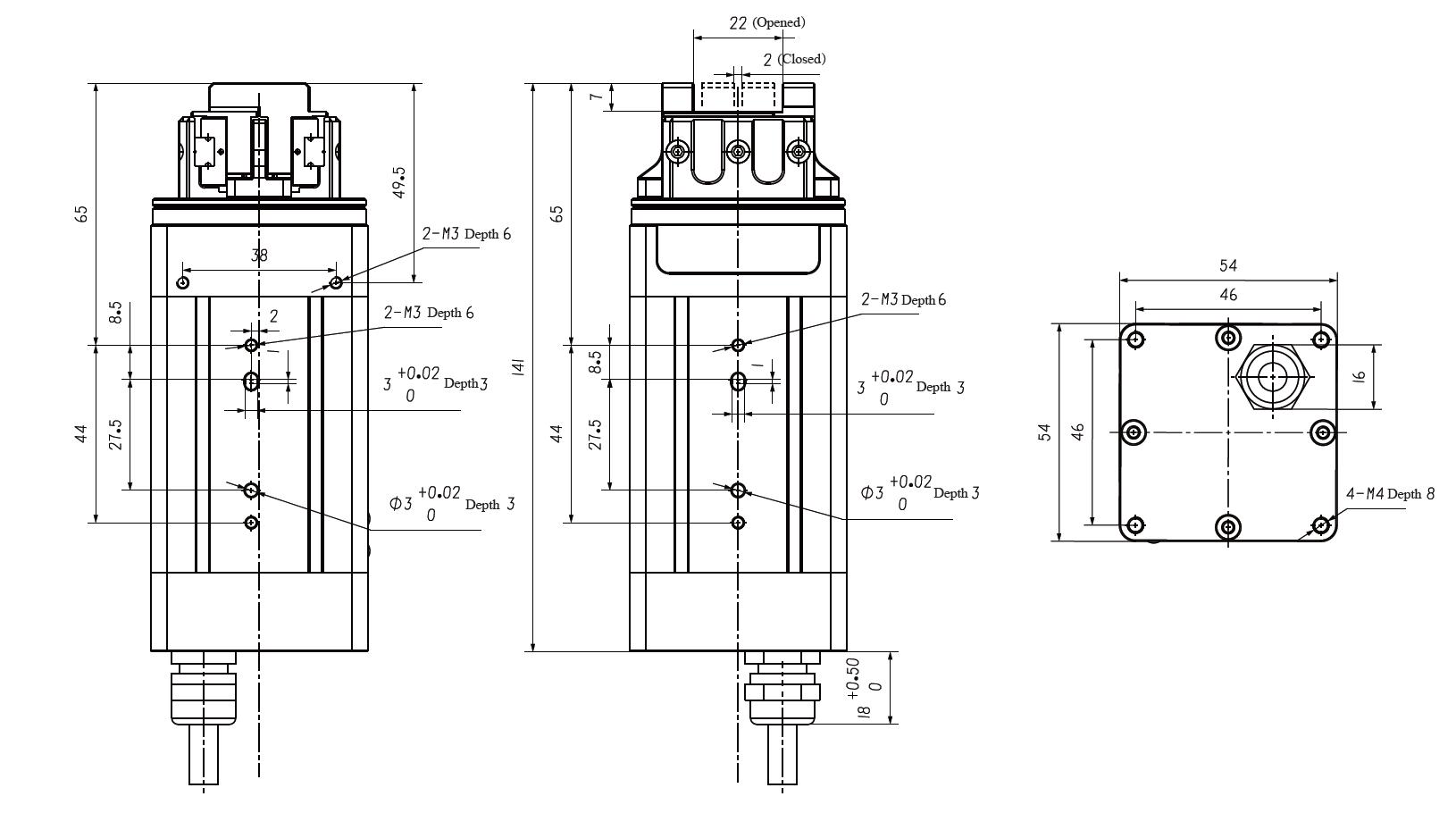
① RKMV8-354 Filogi biyar na jirgin sama zuwa RKMV8-354
② Ƙarfin gripper ɗin lantarki shine 20mm
③ Matsayin shigarwa, yi amfani da sukurori M6 guda biyu don haɗawa da flange a ƙarshen hannun robot na UR
④ Matsayin shigarwa, matsayin shigarwa na kayan aiki (sukurori M6)
⑤ Matsayin shigarwa, matsayin shigarwa na kayan aiki (ramukan fil guda 3 na silinda)
Kasuwancinmu







