Jerin Gripper na Wutar Lantarki na HITBOT – Gripper na Wutar Lantarki na Haɗin gwiwa na Z-EFG-R



Babban Rukuni
Hannun robot na masana'antu / Hannun robot na haɗin gwiwa / Riƙe wutar lantarki/Mai kunna fasaha/Mafita ta atomatik
Aikace-aikace
Na'urorin riƙe robot na SCIC Z-EFG suna da ƙananan girma tare da tsarin servo da aka gina a ciki, wanda ke ba da damar cimma daidaitaccen iko na gudu, matsayi, da ƙarfin matsewa. Tsarin riƙewa na SCIC na zamani don mafita na sarrafa kansa zai ba ku damar buɗe sabbin damammaki don yin ayyuka ta atomatik waɗanda ba ku taɓa tsammanin zai yiwu ba.

Fasali

·Ƙaramin na'urar riƙe wutar lantarki mai ƙarfi amma mai ƙarfi ta injin servo.
·Ana iya maye gurbin tashoshi don biyan buƙatun aiki daban-daban.
·Zai iya ɗaukar abubuwa masu rauni da nakasa, kamar ƙwai, bututun gwaji, zobba, da sauransu.
·Ya dace da wuraren da ba su da hanyoyin iska (kamar dakunan gwaje-gwaje, da asibitoci).
Tsarin Servo Mai Haɗaka Ya Aiwatar Don Buƙatu Daban-daban
Babban Ƙarfin Matsewa
Ƙarfin matsewa: 80N,
bugun jini: 20mm
Sarrafa Daidaito
Maimaitawa: ±0.02mm
Toshewa da Kunnawa
An tsara shi musamman donna'urar riƙe wutar lantarki ta axis shida
An gina Mai Kulawa
Ƙaramin rufe yanki, mai dacewa don haɗawa.
Ana iya canza Wutsiya
Ana iya canza wutsiyarsa don amfani da shi don buƙatu daban-daban.
Matsewa Mai Laushi
Yana iya manne abubuwa masu rauni

● Inganta juyin juya hali wajen maye gurbin na'urorin riƙe wutar lantarki ta hanyar amfani da na'urorin riƙe wutar lantarki, na farko da aka fara amfani da su ta hanyar amfani da na'urar servo a China.
● Cikakken maye gurbin matse iska + matattara + bawul ɗin solenoid + bawul ɗin matsewa + mai riƙe iska
● Tsawon rayuwar sabis na kekuna da yawa, daidai da silinda ta gargajiya ta Japan




Sigar Musamman
Z-EFG-R na'urar riƙe wutar lantarki ce ta robot wadda ke da na'urar sarrafawa a ciki kuma tana da ayyuka da yawa a cikin ɗaya. Ƙarami ne, amma yana da ƙarfi a cikin aiki.
● Ƙaramin na'urar riƙe wutar lantarki mai ƙarfi amma mai ƙarfi ta injin servo.
●Ana iya maye gurbin tashoshi don biyan buƙatun aiki daban-daban.
● Zai iya ɗaukar abubuwa masu rauni da nakasa, kamar ƙwai, bututun gwaji, zobba, da sauransu.
● Ya dace da wuraren da ba su da hanyoyin iska (kamar dakunan gwaje-gwaje, da asibitoci).
Z-EFG-R ƙaramin gripper ne na lantarki wanda ke da tsarin servo mai haɗawa, yana iya maye gurbin famfo + matattarar + ƙimar maganadisu ta electron + bawul ɗin maƙura + gripper na iska.
| Lambar Samfura Z-EFG-R | Sigogi |
| Jimlar bugun jini | 20mm |
| Ƙarfin riƙewa | 80N |
| Maimaitawa | ±0.02mm |
| Nauyin riƙewa da aka ba da shawarar | 0.8kg |
| Yanayin watsawa | Jagorar rakin gear + jagorar na'urar birgima |
| Cika mai na abubuwan da ke motsawa | Duk wata shida ko motsi miliyan 1 / lokaci |
| Lokacin motsi na bugun hanya ɗaya | 0.45s |
| Matsakaicin zafin aiki | 5-55℃ |
| Tsarin zafi na aiki | RH35-80 (Babu sanyi) |
| Yanayin motsi | Yatsu biyu suna motsawa a kwance |
| Kula da bugun jini | Ana iya daidaitawa |
| Daidaita ƙarfin matsewa | Ana iya daidaitawa |
| Nauyi | 0.5kg |
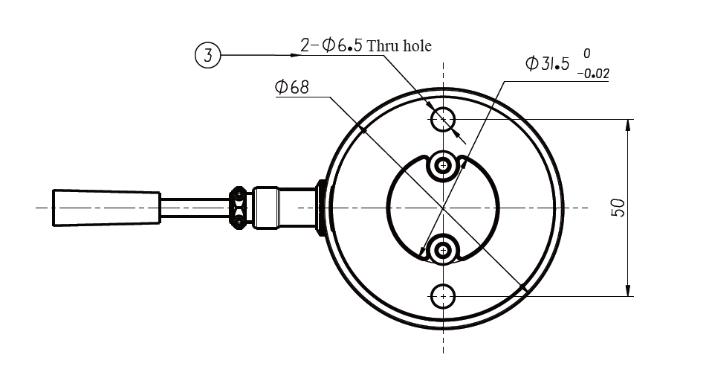
| Girma (L*W*H) | 68*68*132.7mm |
| Sanya Mai Kulawa | Gina-ciki |
| Ƙarfi | 5W |
| Nau'in mota | Ba tare da gogewa ba na DC |
| Ƙarfin wutar lantarki mai ƙima | 24V |
| Matsakaicin wutar lantarki | 1A |
| Hannun robot mai sassa shida mai daidaitawa | UR, Aubo |
Tuki da Mai Gudanarwa an gina su
Z-EFG-R ƙaramin gripper ne na lantarki wanda ke da tsarin servo mai haɗawa, yana iya maye gurbin famfon iska + matattara + bawul ɗin maganadisu na electron + bawul ɗin maƙura + mai riƙe iska.


Mai jituwa da Six-Axis Robot Arm
Mai riƙewa zai iya dacewa da babban hannun robot mai axis shida, don cimma haɗakarwa da kunnawa, yana da tsawon bugun 20mm, ƙarfin ɗaurewa shine 80N, ana iya daidaita bugunsa da ƙarfin ɗaurewa.
Ƙaramin Siffa, Mai Sauƙi Don Shigarwa
Girman Z-EFG-R shine L68*W68* H132.7mm, tsarinsa yana da ƙanƙanta, yana tallafawa hanyoyin shigarwa da yawa, an gina mai sarrafawa a ciki, ƙaramin sarari yana mamaye, yana da sauƙin amfani don buƙatun ayyuka daban-daban na mannewa.

Saurin Amsawa, Kula da Daidaito
Lokacin motsi mafi guntu na bugun guda ɗaya shine 0.45s, maimaituwa shine ±0.02mm, ana iya canza ɓangaren wutsiyarsa cikin sauƙi, abokan ciniki za su iya manne abin bisa ga buƙata.
Tsarin Shigarwa na Girma
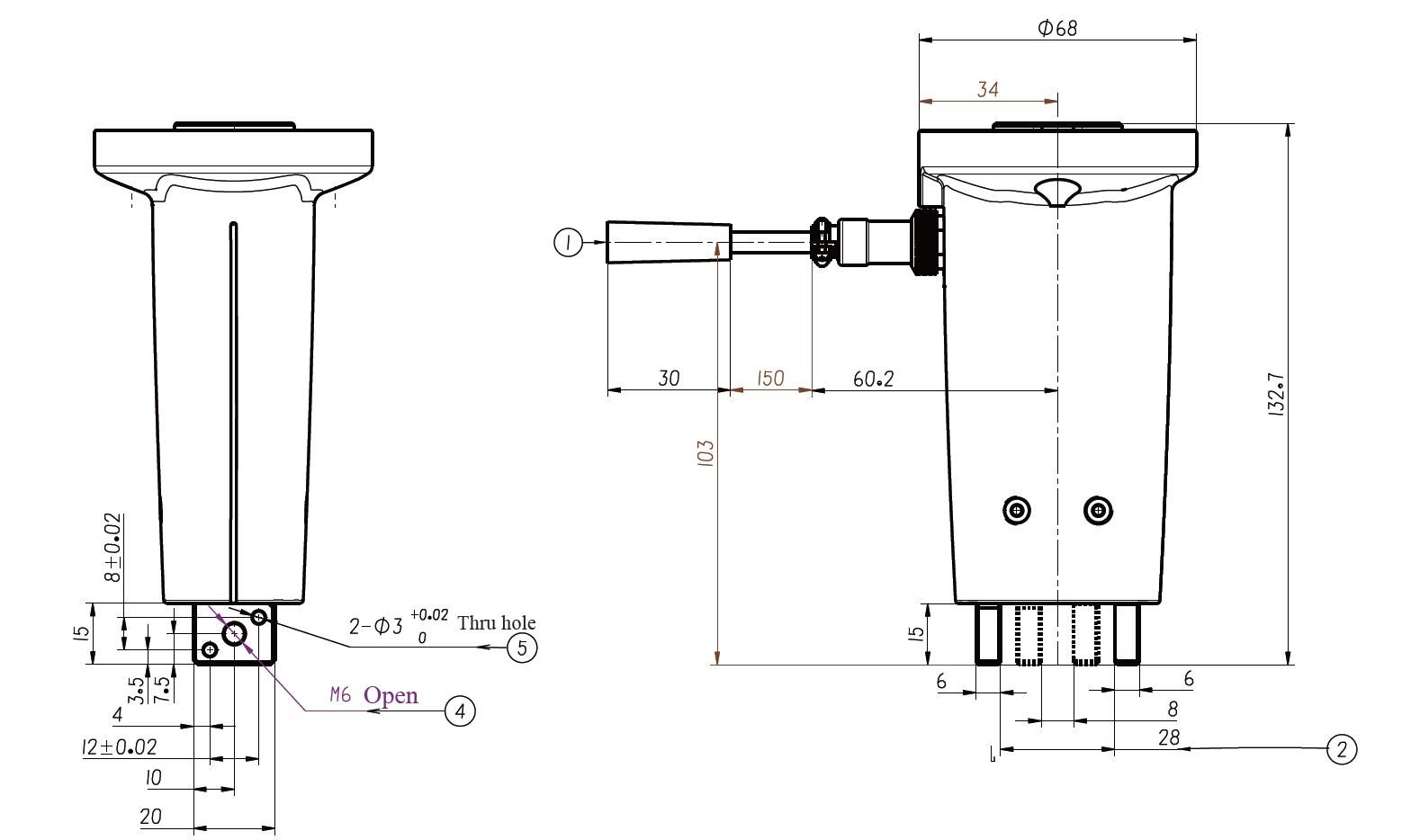
① RKMV8-354 Filogi biyar na jirgin sama zuwa RKMV8-354
② Ƙarfin gripper ɗin lantarki shine 20mm
③ Matsayin shigarwa, yi amfani da sukurori M6 guda biyu don haɗawa da flange a ƙarshen hannun robot na UR
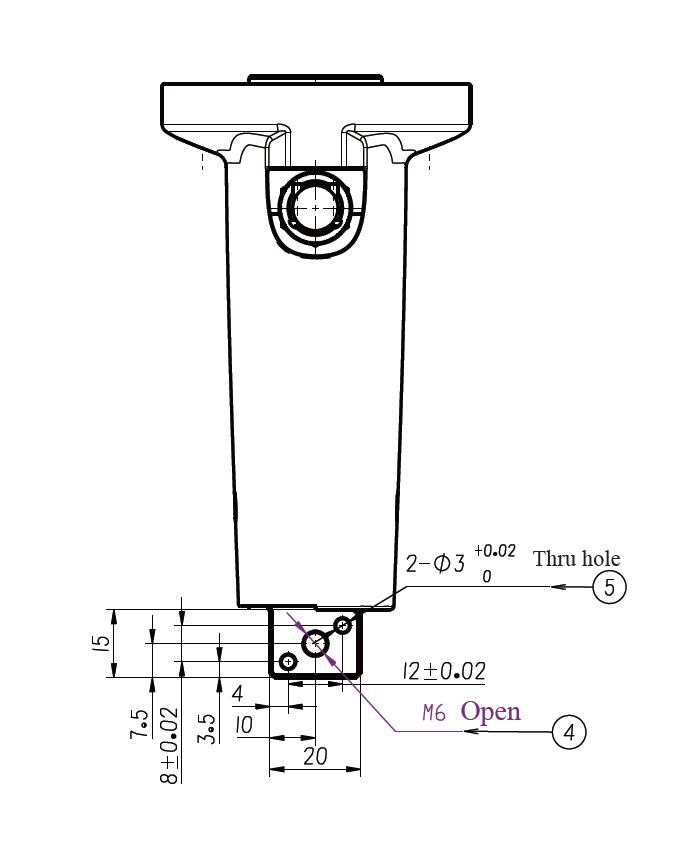
④ Matsayin shigarwa, matsayin shigarwa na kayan aiki (sukurori M6)
⑤ Matsayin shigarwa, matsayin shigarwa na kayan aiki (ramukan fil guda 3 na silinda)
Sigogi na Lantarki
Ƙwaƙwalwar lantarki mai ƙima 24±2V
0.4A na yanzu

Kasuwancinmu







