Jerin Saurin Canzawa – QCA-05 Na'urar Canzawa Mai Sauri a Ƙarshen Robot





Babban Rukuni
Mai Canza Kayan Aiki na Robot / Mai Canza Kayan Aiki na Ƙarshen Hannun Hannu (EOAT) / Tsarin Canzawa da Sauri / Mai Canza Kayan Aiki ta atomatik / Tsarin Kayan Aiki na Robot / Gefen Robot / Sassauƙaƙen Kayan Aiki / Saki da Sauri / Mai Canza Kayan Aiki na Pneumatic / Mai Canza Kayan Aiki na Wutar Lantarki / Mai Canza Kayan Aiki na Hydraulic / Mai Canza Kayan Aiki na Daidaito / Tsarin Kulle Tsaro / Mai Tasirin Ƙarshe / Aiki da Kai / Ingancin Canza Kayan Aiki / Musayar Kayan Aiki / Aiki da Kai na Masana'antu / Kayan Aiki na Ƙarshen Hannun Robot / Tsarin Modular
Aikace-aikace
Ana amfani da Kayan Aikin Ƙarshen Hannun Hannu (EOAT) sosai a masana'antu kamar kera motoci, na'urorin lantarki na 3C, dabaru, ƙera allura, marufi na abinci da magunguna, da sarrafa ƙarfe. Manyan ayyukansa sun haɗa da sarrafa kayan aiki, walda, feshi, dubawa, da sauya kayan aiki cikin sauri. EOAT yana ƙara inganta ingancin samarwa, sassauci, da ingancin samfura sosai, wanda hakan ya sa ya zama muhimmin ɓangare na sarrafa kansa na masana'antu na zamani.
Fasali
Babban daidaito
Gefen maƙallin daidaitawa na piston yana taka rawar matsayi, wanda ke ba da daidaiton matsayi mai maimaitawa mai yawa. Gwaje-gwajen zagaye miliyan ɗaya sun nuna cewa daidaiton ainihin ya fi ƙimar da aka ba da shawarar.
Babban ƙarfi
Piston ɗin kullewa mai girman silinda yana da ƙarfin kullewa mai ƙarfi, na'urar robot ta SCIC mai sauri tana da ƙarfin hana juyawa. Lokacin kullewa, ba za a yi girgiza ba saboda motsi mai sauri, don haka guje wa gazawar kullewa da tabbatar da daidaiton matsayi akai-akai.
Babban aiki
An yi amfani da tsarin kullewa tare da ƙirar saman mazugi mai yawa, abubuwan rufewa na tsawon rai da kuma binciken lamba mai inganci don tabbatar da kusancin siginar module.



Sigar Musamman
| Jerin Saurin Canzawa | ||||
| Samfuri | Matsakaicin nauyin da ake buƙata | Hanyar iskar gas | Ƙarfin Kullewa@80Psi (5.5Bar) | Nauyin samfurin |
| QCA-05 | 5kg | 6-M5 | 620N | 0.4kg |
| QCA-05 | 5kg | 6-M5 | 620N | 0.3kg |
| QCA-15 | 15kg | 6-M5 | 1150N | 0.3kg |
| QCA-25 | 25kg | 12-M5 | 2400N | 1.0kg |
| QCA-35 | 35kg | 8-G1/8 | 2900N | 1.4kg |
| QCA-50 | 50kg | 9-G1/8 | 4600N | 1.7kg |
| QCA-S50 | 50kg | 8-G1/8 | 5650N | 1.9kg |
| QCA-100 | 100kg | 7-G3/8 | 12000N | 5.2kg |
| QCA-S100 | 100kg | 5-G3/8 | 12000N | 3.7kg |
| QCA-S150 | 150kg | 8-G3/8 | 12000N | 6.2kg |
| QCA-200 | 300kg | 12-G3/8 | 16000N | 9.0kg |
| QCA-200D1 | 300kg | 8-G3/8 | 16000N | 9.0kg |
| QCA-S350 | 350kg | / | 31000N | 9.4kg |
| QCA-S500 | 500kg | / | 37800N | 23.4kg |

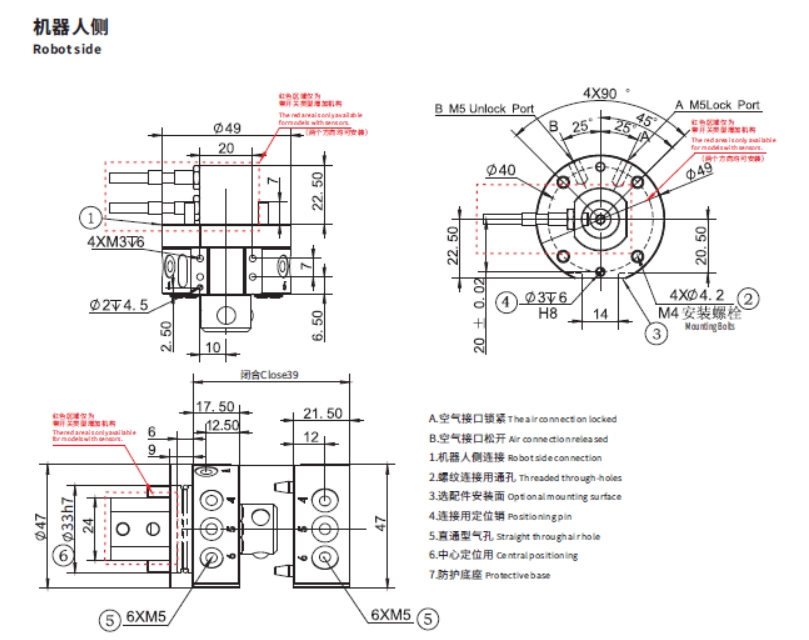
Siginar siginar ɓangaren robot

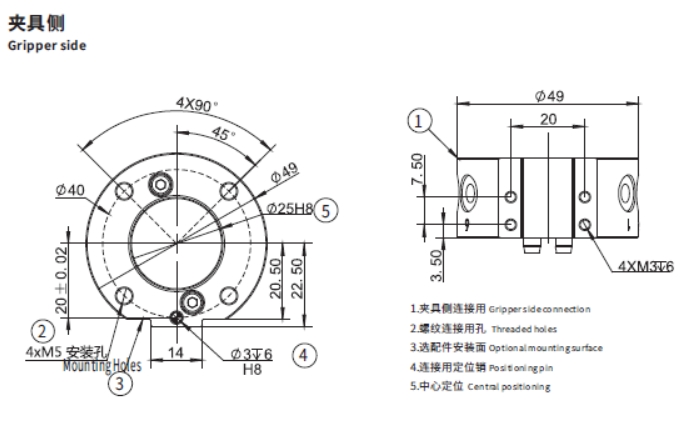
Siginar siginar gefen gripper

Bangaren robot

Gefen gripper

Maɓallin gefen madauri na robot
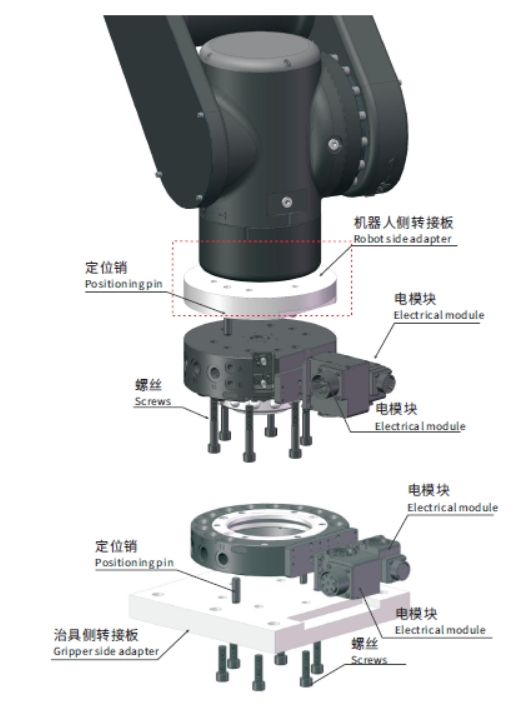
Module Mai Aiki
Nau'in module
| Sunan Samfuri | Samfuri | PN | Aiki Voltage | Aikin Yanzu | Mai haɗawa | Mai haɗawa PN |
| Module ɗin siginar gefe na robot | QCSM-15R1 | 7.Y00965 | 24V | 2.5A | DB15R1-1000① | 1.Y10163 |
| Module ɗin siginar gefe na Gripper | QCSM-15G1 | 7.Y00966 | 24V | 2.5A | DB15G1-1000① | 1.Y10437 |
①Tsawon kebul ɗin mita 1 ne
Layin Fita Mai Madauri na HF
| Sunan Samfuri | Samfuri | PN |
| Module ɗin mita mai tsayi na gefe na robot | QCHHFM-02R-1000 | 7.Y02086 |
| Module ɗin mita mai girman Gripper | QCHHFM-02G-1000 | 7.Y02087 |
Layin Fita Mai Madaidaici Mai Madaidaici Mai Madaidaici Mai Ma'aunin Wutar Lantarki Mai Ma'aunin 15
| Sunan Samfuri | Samfuri | PN |
| Module ɗin lantarki na gefe na robot mai ci 15 | QCSM-15R1-1000 | 7.Y02097 |
| Module ɗin lantarki na Gripper na 15-core | QCSM-15G1-1000 | 7.Y02098 |
Layin Module Mai Madaidaiciya
| Sunan Samfuri | Samfuri | PN |
| Module ɗin mita mai tsayi na gefe na robot | QCSM-08R-1000 | 7.Y02084 |
| Module ɗin mita mai girman Gripper | QCSM-08G-1000 | 7.Y02085 |
Haɗin Kebul na RJ45S na hanyar sadarwa
| Sunan Samfuri | Samfuri | PN |
| Sashen robot na RJ455 servo module | QCSM-RJ45*5M-06R | 7.Y02129 |
| Side gripper RJ455 servo module | QCSM-RJ45*5M-06G | 7.Y02129 |
Kasuwancinmu







