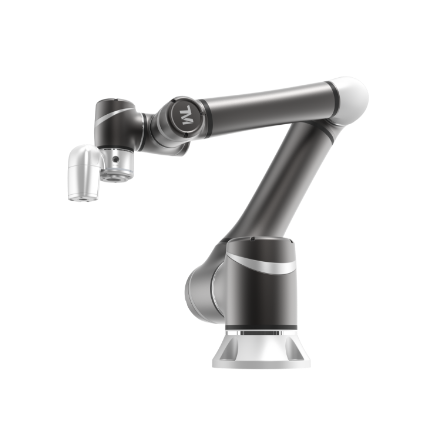
Jerin TM AI COBOT – TM14M 6 Axis AI Cobot
Babban Rukuni
Hannun robot na masana'antu / Hannun robot na haɗin gwiwa / Riƙe wutar lantarki/Mai kunna fasaha/Mafita ta atomatik
Aikace-aikace
An ƙera TM14 don manyan ayyuka tare da daidaito da aminci mai kyau. Tare da ikon ɗaukar nauyin da ya kai kilogiram 14, yana da amfani musamman don ɗaukar kayan aiki masu nauyi na ƙarshen hannu da kuma sa ayyuka su fi inganci ta hanyar rage lokacin zagayowar. An ƙera TM14 don ayyuka masu wahala da maimaitawa, kuma yana ba da aminci mai kyau tare da na'urori masu hankali waɗanda ke dakatar da robot nan take idan an gano hulɗa, suna hana duk wani rauni ga mutum da na'ura.
Tare da tsarin hangen nesa mai jagoranci a aji, fasahar AI mai ci gaba, cikakken tsaro, da sauƙin aiki, AI Cobot zai kai kasuwancinka fiye da kowane lokaci. Ɗauki atomatik zuwa mataki na gaba ta hanyar haɓaka yawan aiki, inganta inganci, da rage farashi.
Siffofi
MAI WAYO
Kare Cobot ɗinka na gaba tare da AI
• Duba ido ta atomatik (AOI)
• Tabbatar da inganci da daidaito
• Ƙara ingancin samarwa
• Rage farashin aiki
SAUƘI
Ba a buƙatar ƙwarewa ba
• Tsarin zane don sauƙin shirye-shirye
• Tsarin aikin gyarawa wanda ya dace da tsari
• Jagora mai sauƙi don koyarwa a matsayi
• Daidaita gani mai sauri tare da allon daidaitawa
AMINCI
Tsaron haɗin gwiwa shine fifikonmu
• Ya yi daidai da ISO 10218-1:2011 da ISO/TS 15066:2016
• Gano kamuwa da cuta tare da tsayawar gaggawa
• Ajiye farashi da sarari don shingaye da shinge
• Saita iyakokin gudu a cikin wurin aiki na haɗin gwiwa
Kwamfutocin cobot masu amfani da AI suna gane kasancewar da kuma yanayin muhallinsu da sassansu don yin duba na gani da ayyukan ɗaukar hoto masu motsi. Yi amfani da AI ba tare da wahala ba a layin samarwa da ƙara yawan aiki, rage farashi, da kuma rage lokacin zagayowar. Hangen nesa na AI kuma yana iya karanta sakamakon injina ko kayan aikin gwaji da kuma yanke shawara mai dacewa daidai gwargwado.
Bayan inganta hanyoyin sarrafa kansa, cobot mai sarrafa AI zai iya bin diddigin bayanai, yin nazari, da haɗa bayanai yayin samarwa don hana lahani da inganta ingancin samfura. Inganta sarrafa kansa ta masana'antar ku cikin sauƙi tare da cikakken tsarin fasahar AI.
Robot ɗinmu na haɗin gwiwa suna da tsarin hangen nesa mai haɗaka, wanda ke ba wa cobots damar fahimtar yanayinsu wanda hakan ke ƙara haɓaka ƙarfin cobot sosai. Hangen nesa na robot ko ikon "gani" da fassara bayanai na gani zuwa umarnin umarni yana ɗaya daga cikin abubuwan da ke sa mu zama ƙwararru. Yana da sauƙin aiwatar da ayyuka daidai a wuraren aiki masu canzawa, yana sa ayyuka su yi aiki cikin sauƙi, da kuma sarrafa ayyukan atomatik yadda ya kamata.
An tsara shi da la'akari da masu amfani da shi a karon farko, ilimin shirye-shirye ba abu ne da ake buƙata ba don fara amfani da AI Cobot. Motsin danna-da-ja da amfani da manhajar shirye-shiryenmu yana rage sarkakiyar. Fasaharmu mai lasisi tana bawa masu aiki waɗanda ba su da ƙwarewar rubuta lambobi damar tsara wani aiki na ɗan gajeren lokaci kamar mintuna biyar.
Na'urori masu auna aminci na asali za su dakatar da AI Cobot lokacin da aka gano hulɗa ta jiki, wanda hakan zai rage barnar da ka iya faruwa ga muhalli mara matsi da aminci. Hakanan zaka iya saita iyakokin gudu ga robot ɗin don a iya amfani da shi a wurare daban-daban kusa da ma'aikatanka.
Kayayyaki Masu Alaƙa



Sigar Musamman
| Samfuri | TM14M | |
| Nauyi | 32.5KG | |
| Matsakaicin nauyin da ake buƙata | 14KG | |
| Isarwa | 1100mm | |
| Jerin Haɗin gwiwa | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±163° | |
| Gudu | J1, J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 150°/s | |
| J5 | 150°/s | |
| J6 | 180°/s | |
| Gudun da Aka saba | 1.1m/s | |
| Matsakaicin gudu | 4m/s | |
| Maimaitawa | ± 0.1mm | |
| Matakin 'yanci | Haɗin juyawa guda 6 | |
| I/O | Akwatin sarrafawa | Shigarwar dijital: 16 Fitowar dijital: 16 Shigarwar analog: 2 Fitowar analog: 1 |
| Kayan aiki Conn. | Shigarwar dijital: 4 Fitowar dijital:4 Shigarwar analog: 1 Fitowar analog:0 | |
| Na'urar Wutar Lantarki ta I/O | 24V 2.0A don akwatin sarrafawa da 24V 1.5A don kayan aiki | |
| Rarraba IP | IP54 (Robot Arm); IP32 (Akwatin Sarrafa) | |
| Amfani da Wutar Lantarki | Matsakaicin watts 300 | |
| Zafin jiki | Robot ɗin zai iya aiki a yanayin zafi na 0-50℃ | |
| Tsafta | ISO Aji na 3 | |
| Tushen wutan lantarki | 22-60 VDC | |
| Tsarin I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Sadarwa | RS232, Ethemet, Modbus TCP/RTU (master & slave), PROFINET (Zaɓi), EtherNet/IP (Zaɓi) | |
| Muhalli na Shirye-shirye | TMflow, bisa ga jadawalin kwarara | |
| Takardar shaida | CE, SEMI S2 (Zaɓi) | |
| AI & Hangen Nesa*(1) | ||
| Aikin AI | Rarrabawa, Gano Abubuwa, Rarrabawa, Gano Abubuwan da ba su da kyau, AI OCR | |
| Aikace-aikace | Matsayi, Karatun Barcode na 1D/2D, OCR, Gano Lalacewa, Aunawa, Duba Haɗawa | |
| Daidaiton Matsayi | Matsayi na 2D: 0.1mm*(2) | |
| Ido a Hannu (An Gina a ciki) | Carmera mai launi mai mayar da hankali ta atomatik tare da ƙudurin 5M, Nisa ta aiki 100mm ~ ∞ | |
| Ido zuwa Hannu (Zaɓi ne) | Goyi bayan mafi girman kyamarori 2D na 2xGigE ko kyamarar 2D ta 1xGigE + kyamarar 3D ta 1x*(3) | |
| *(1)Babu makamai na robot masu hangen nesa da aka gina a ciki TM12X, TM14X, TM16X, TM20X kuma ana samun su. *(2)An auna bayanan da ke cikin wannan tebur ta hanyar dakin gwaje-gwaje na TM kuma nisan aiki shine 100mm. Ya kamata a lura cewa a aikace-aikace na aiki, ƙimar da ta dace na iya bambanta saboda dalilai kamar tushen hasken yanayi na wurin, halayen abu, da hanyoyin shirye-shiryen gani waɗanda zasu shafi canjin daidaito. *(3)Duba gidan yanar gizon hukuma na TM Plug & Play don samfuran kyamara masu dacewa da TM Robot. | ||
Kasuwancinmu







